回転軸の速度、運動方向、位置を測定する必要がある場合は、回転計が必要になる可能性があります。 エンコーダ。選択する際には、インクリメンタル エンコーダとアブソリュート エンコーダの2つの主なタイプを考慮する必要があります。
正しい選択をすることが重要です。そのため、アブソリュート エンコーダーとは何か、インクリメンタル エンコーダーとどう違うのか、どのような状況でアブソリュート エンコーダーが必要になるのかを理解できるように、アブソリュート エンコーダーに関する短いガイドを作成しました。
アブソリュートエンコーダはどのように動作するのでしょうか?
絶対エンコーダは、エンコーダの「絶対」位置を表す、回転の各ポイントで一意の位置値またはデータ ワードを提供します。絶対エンコーダは、スイッチを入れた瞬間から、測定している回転シャフトの正確な位置を教えてくれます。これは、光学センサー、磁気センサー、または静電容量センサーを使用して、シャフトとともに回転するディスクから固有のコードを読み取ることによって行われます。重要なのは、アブソリュート エンコーダはシャフトを回転させなくてもこれを実行でき、一時的な電源喪失の場合でもこの位置を追跡できることです。エンコーダーのディスク上にある固有のコードが多いほど、位置の読み取り精度が高くなります。

光学式エンコーダディスクと静電容量式エンコーダディスクの比較
解像度は、1回転あたりの一意のデータ ワードの数に対応するビット (2進数) で表されます。アブソリュート エンコーダには、シングル ターンとマルチ ターンのバリエーションもあります。シングルターン エンコーダーは、シャフトが1回転するたびに出力が繰り返され、360° の1回転にわたって位置決めデータを提供します。マルチターン エンコーダーも1回転での位置データを提供しますが、回転数を測定する追加の「回転」カウンターがあります。
関連: Arduinoボードでロータリー エンコーダを使用する
インクリメンタルエンコーダはどのように機能しますか?
逆に、インクリメンタル エンコーダーは、シャフトが回転するときにパルスを生成することによって動作します。一般的なインクリメンタル エンコーダーは、位相が90度ずれた2つの方形波を生成します。これらのパルスは、エンコーダ外部の電子機器によって追跡またはカウントされる必要があります。

典型的なインクリメンタルエンコーダ波形90° 位相ずれ
解像度は、1回転あたりのパルス数 (PPR) で表され、インクリメンタル エンコーダのいずれかの方形波出力から得られる高パルスの数を表します。
インクリメンタル エンコーダの出力は4つの繰り返し状態のうちの1つだけであるため、意味のある位置情報を提供するには、エンコーダを既知の固定位置または「ホーム」に参照する必要があります。多くの場合、エンコーダのインデックス パルスと一致するホーム位置から、シャフトの回転の増分変化を追跡し、シャフトの絶対位置を知ることができます。これは、インクリメンタル エンコーダをオンにするたびに、または一時的に電源が失われた場合に必ず発生します。その結果、絶対位置の読み取りに時間がかかり、それを提供するためにシャフトを回転させる必要が生じます。
インクリメンタル エンコーダはアブソリュート モデルよりも複雑ではないため、通常は安価です (ただし、価格差は縮小しています)。速度、動きの方向、または相対位置のみを監視する場合は、通常、増分エンコーダが最適なオプションですが、絶対位置が主な懸念事項である場合は、絶対エンコーダが最適です。
アブソリュートエンコーダとインクリメンタルエンコーダの選択方法
まず、アブソリュート エンコーダはシャフトの位置を維持するため、電力を供給するとすぐに位置がわかります。ホーミングまたはキャリブレーション シーケンスが完了するのを待つ必要がなく、エンコーダがオフのときにシャフトが回転した場合でも、起動時または停電後に、必要な位置データをより迅速に取得できます。
起動時の絶対位置を知ることは、多くのシステムで不可欠です。特定の位置では、シャフトを一方向に回転させ続けるのは安全ですが、他の方向に回転させるのは安全ではないからです。アプリケーションによっては、これを間違えると、機器の損傷、身体の傷害、またはさらに悪い結果を招く可能性があります。このような状況では、部品が動く前に回転装置の正確な位置を把握することが重要です。
同様に重要なのは、絶対エンコーダが実際の位置をリアルタイムで提供することです。ますます多くのシステムが中央通信バスへの接続によりデジタル化されるにつれて、最小限の遅延で、必要なときに必要なだけエンコーダーをポーリングしてリアルタイムの位置を取得できることは大きな利点となります。インクリメンタル エンコーダーを使用して位置を追跡するには、ホーミング シーケンスの後でも、外部回路 (通常は直交デコード経由) を使用してすべてのパルスを追跡する必要があります。外部回路が必要になることに加え、位置を決定する際にも遅延が発生することになります。
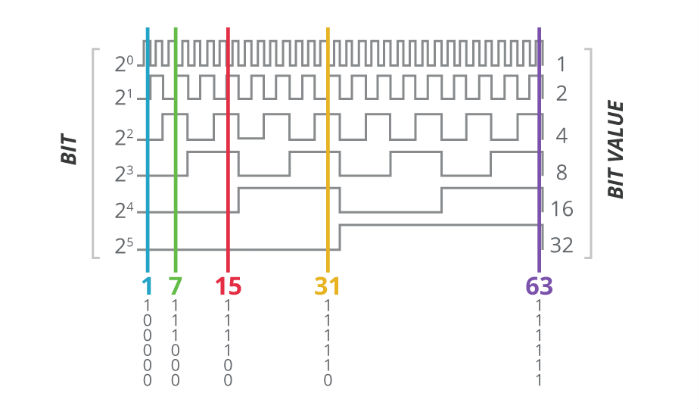
アブソリュートエンコーダは、指定された解像度の各位置に対して固有のデジタル「ワード」を生成します。
他にもメリットはあります。アブソリュート エンコーダを実装するシステムは、パルスをカウントする必要があるインクリメンタル エンコーダではなく、バイナリ エンコーダからエラー チェック済みコードを読み取るか、シリアル バスを介してデジタルで位置を取得するため、一般的に電気ノイズの影響を受けにくくなります。
これに関連して、工場の自動化や複数の関節を持つロボットアームなど、同じシステム内に複数のアブソリュートエンコーダを組み合わせることが比較的簡単であるという事実があります。インクリメンタル エンコーダーを使用する場合、複数のデバイスからの出力を監視するのは非常に複雑になり、かなりの処理能力が必要になります。しかし、アブソリュート エンコーダ、特に中央通信バスにリンクできるエンコーダを使用すると、各エンコーダから個別にデータを取得できるため、読み取り値を解釈するために必要な処理能力が大幅に少なくなります。
アブソリュートエンコーダの用途
アブソリュート エンコーダとインクリメンタル エンコーダの主な違いを説明したので、アブソリュート エンコーダが使用される特定のシナリオを簡単に見てみましょう。
重要な市場はロボット工学であり、さまざまな分野にまたがり急速に拡大している分野です。製造業では、組み立て、溶接、塗装などの作業にロボットアームが使われています。ヘルスケアの分野でも見られます。たとえば、遠隔手術には、ロボットアームからの非常に正確な位置情報が大量に必要です。ホームアシスタンスロボットは、アブソリュートエンコーダの新たな使用例の1つです。
ただし、これはほんの一領域に過ぎません。より多くのシステムがデジタル化され、増分エンコーダとアブソリュート エンコーダの価格差が縮小するにつれて、アブソリュート エンコーダの用途は産業市場と消費者市場の両方でほぼ無限になりつつあります。自動ゲートやカメラジンバルから工場自動化まで、アブソリュートエンコーダは位置を決定するための非常に効果的で、ますます予算に優しい方法になっています。
アブソリュートエンコーダの種類
製品設計に適したタイプのエンコーダを選択することは不可欠です。そのため、インクリメンタル エンコーダとアブソリュート エンコーダの主な違いを理解することが非常に重要です。価格差が縮まり、テクノロジーが変化するにつれて、アブソリュート エンコーダはインクリメンタル エンコーダに比べて多くの明確な利点を持つようになり、位置フィードバック要件に対する魅力的な選択肢となっています。